
MK Multi-Sensor
Base Station and Software

The MK Ground Station is where the drone, the robotic components and other accessories are controlled and monitored from. This device is mobile, meaning that it can be easily transported. The Ground Station is able to manually control all the drones and robotics or set the “Autopilot” mode. The station features a screen which shows all of the data that is wirelessly received from the on-board computer, making it possible to monitor the position of the MK Drones, the number of detections and the followed trajectory. The detections and information collected by the MK demining units are streamed to the Ground station, where they are analysed.

Screenshot of MK Ground Station interface
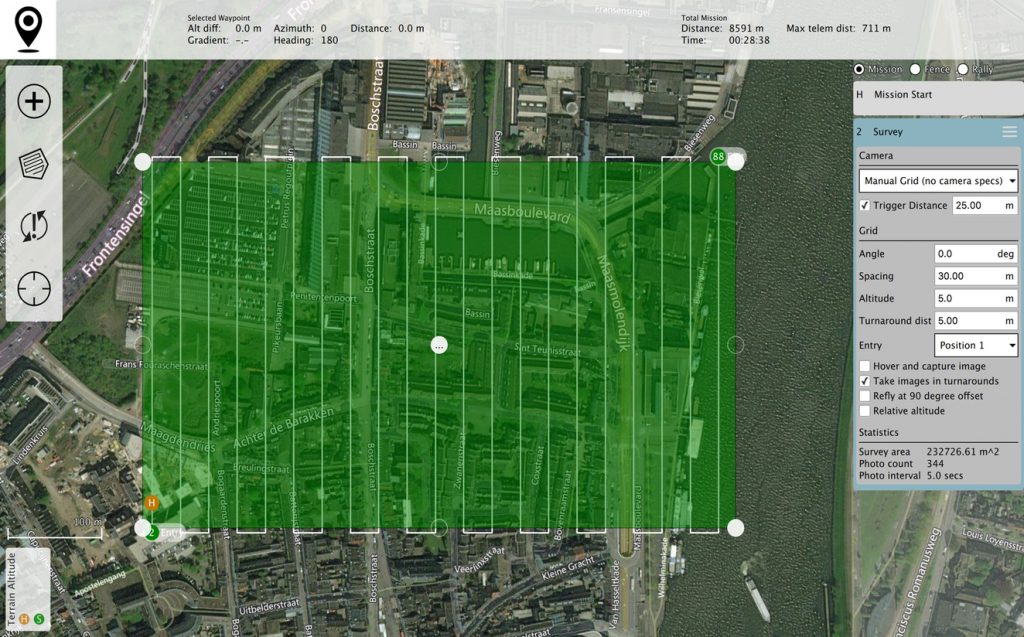
Screenshot of MK Ground Station interface
The MK Manta in Action
Watch the video to find out more about the MK Manta and how it performs the Detection stage by flying above the target area with the MK Multi-Sensor. The readings are instantly sent to the MK Ground Station in order to be reviewed as they occur, in real time. A pattern is made using Mine Kafon software, which places GPS coordinates on a map. This allows the drone to follow a prespecified pattern to map and detect areas.
Autopilot and manual mode
When functioning in its autopilot mode, MK Manta flies in a programmable pattern based on GPS/RTK coordinates with an accuracy of 4 centimeters. From the base station, the robot can be programmed to start at a particular location and scan a designated area. The MK Manta will fly over the chosen area and perform the scanning and marking process. The MK Manta autopilot features a telemetry connection, with which it can adjust the routes in real time while the robot is in flight.

The drone can be programmed to come back to the base station if there are any technical discrepancies or the reliability of the results is hindered. The MK Manta can be controlled manually from the base station. This mode is useful for terrains that contain obstacles (e.g. trees) that the autopilot might struggle to navigate. The person operating the drone from the base station is able to control the drone using the live video camera to remotely see where the MK Manta has to fly next.
Data collection and Multi-sensor
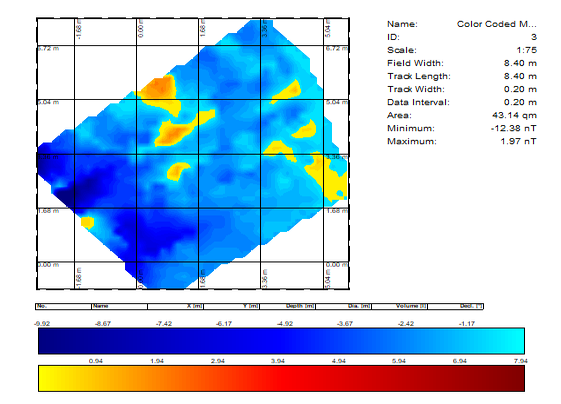
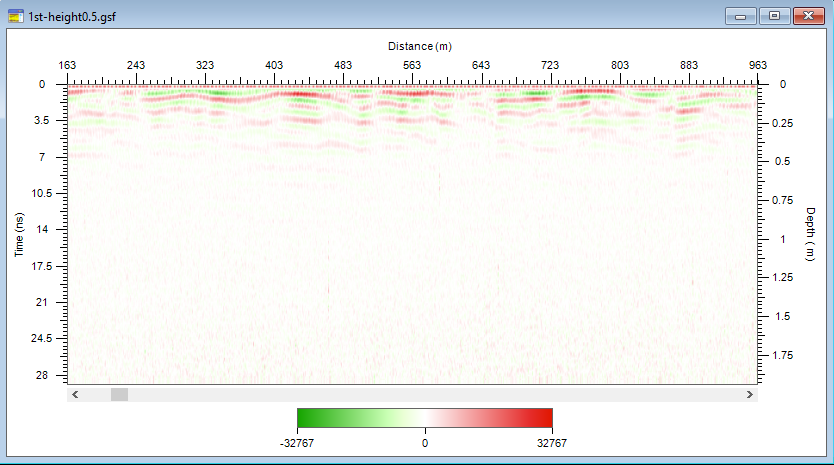
For the Detection phase, the MK Manta flies above the target area with a Mine Kafon Multi Sensor. The data from each operation is collected and analysed in a structured and systematic way, using complex data fusion algorithms. The MKD system collects and puts together data from not just one, but a collection of sensors. The multiple readings allow users to double check data validity.

Snapsot of data reading with Mine Kafon Sensor_2
Snapsot of data reading with Mine Kafon Sensor_2
Snapsot of data reading with Mine Kafon Sensor_3

Snapsot of data reading with Mine Kafon Sensor_3

Snapsot of data reading with Mine Kafon Sensor_1

Snapsot of data reading with Mine Kafon Sensor_1
